> For the complete documentation index, see [llms.txt](https://docs.premium-modellbau.de/premium-modellbau-portal-fuer-anleitungen/llms.txt). Markdown versions of documentation pages are available by appending `.md` to page URLs; this page is available as [Markdown](https://docs.premium-modellbau.de/premium-modellbau-portal-fuer-anleitungen/matek/matek-systems-ubersicht/matek-sensoren/aspd-auav.md).
# ASPD-AUAV
**Artikelnr.:** PM-7223 | **HAN:** ASPD-AUAV
[Zum Premium-Modellbau Shop](https://www.premium-modellbau.de/search?sSearch=PM-7223)
\_x000D\_\* ArduPilot AP\_Periph L431 CAN node \_x000D\_\* All sensors AUAV-L30D \_x000D\_\* CAN & I2C Interface \_x000D\_ \_x000D\_
\_x000D\_\* CAN JST-GH connector, DroneCAN Protocol \_x000D\_\* I2C JST-GH connector, AUAV-L30D I2C mode \_x000D\_\* TX2, MSP protocol \_x000D\_ \_x000D\_
\_x000D\_ \_x000D\_ \_x000D\_
\_x000D\_\* CAN bootloader LED, Blue\_x000D\_ \_x000D\_+ Fast blinking, AP\_Periph bootloader \_x000D\_+ Slow blinking, CAN Node ready \_x000D\_\_x000D\_ \_x000D\_\* 3.3V Power LED, Red \_x000D\_ \_x000D\_
\_x000D\_\* Input voltage range: 4.5\~5.5V \_x000D\_\* Power consumption: 26mA \_x000D\_\* Operating Temperatures: -30°C to 85°C \_x000D\_\* Pressure Range: 7500Pa (± 30 inH2O) \_x000D\_\* Burst Pressure: 103kPa \_x000D\_\* Speed Range: 400 km/h(111 m/s) \_x000D\_ \_x000D\_
\_x000D\_\* 36mm\*32mm\*7.3mm \_x000D\_\* 5g \_x000D\_\* 3D step file [ASPD-AUAV\_STEP.zip](https://www.mateksys.com/Downloads/other/ASPD-AUAV_STEP.zip) \_x000D\_ \_x000D\_
#### **Includes**
\_x000D\_
\_x000D\_\* 1x ASPD-AUAV \_x000D\_\* 2x JST-GH-4P to JST-GH-4P 20cm silicon wire \_x000D\_\* Pitot Tube \_x000D\_\* Clear silicon tubing 40cm \_x000D\_ \_x000D\_
#### AP\_Periph & DroneCAN protocol
\_x000D\_\_x000D\_
\_x000D\_\* Firmware \_x000D\_\* AP\_Periph \_x000D\_\* DroneCAN protocol \_x000D\_ \_x000D\_\_x000D\_
#### Wiring and AP Parameters
\_x000D\_
\_x000D\_\_x000D\_| | | | | | | | | | --- | --- | --- | --- | --- | --- | --- | --- | |\_x000D\_ CAN | |\_x000D\_ or |\_x000D\_ I2C | |\_x000D\_ or |\_x000D\_ UART | |\_x000D\_ \_x000D\_|\_x000D\_ ASPD-AUAV |\_x000D\_ FC |\_x000D\_ |\_x000D\_ ASPD-DUAV |\_x000D\_ FC |\_x000D\_ |\_x000D\_ ASPD-DUAV |\_x000D\_ FC |\_x000D\_ \_x000D\_|\_x000D\_ 5V \_x000D\_ CANH \_x000D\_ CANL \_x000D\_ G |\_x000D\_ 4.5-5.5V \_x000D\_ CAN High \_x000D\_ CAN Low \_x000D\_ GND |\_x000D\_ |\_x000D\_ 5V \_x000D\_ SCL \_x000D\_ SDA \_x000D\_ G |\_x000D\_ 4.5-5.5V \_x000D\_ SCL \_x000D\_ SDA \_x000D\_ GND |\_x000D\_ |\_x000D\_ 5V \_x000D\_ G \_x000D\_ TX2 |\_x000D\_ 4.5-5.5V \_x000D\_ GND \_x000D\_ spare UART\_RX |\_x000D\_ \_x000D\_|\_x000D\_ ARSPD\*\_USE \_x000D\_ ARSPD\*\_TYPE |\_x000D\_ 1 \_x000D\_ 8 (UAVCAN) |\_x000D\_ |\_x000D\_ ARSPD\*\_USE \_x000D\_ ARSPD\*\_TYPE |\_x000D\_ 1 \_x000D\_ 19 (AUAV-30in) |\_x000D\_ |\_x000D\_ ARSPD\*\_USE \_x000D\_ ARSPD\*\_TYPE |\_x000D\_ 1 \_x000D\_ 14 (MSP) |\_x000D\_ \_x000D\_|\_x000D\_ | |\_x000D\_ |\_x000D\_ | |\_x000D\_ |\_x000D\_ SERIAL\*\_BAUD \_x000D\_ SERIAL\*\_PROTOCOL |\_x000D\_ 115 (115200) \_x000D\_ 32 (MSP) |\_x000D\_ \_x000D\_\_x000D\_
\_x000D\_
Tips
\_x000D\_
\_x000D\_\* CAN Baro is enabled by default, If you don’t use the Baro integrated in AUAV, set “BARO\_ENABLE = 0” in “Mission Planner->Initial Setup->Optional Hardware->UAVCAN->MAVlink CANx -> Menu Parameters” \_x000D\_\* ArduPilot has removed AUAV I2C support by default on flight controller with 1MB flash MCU(such as F405, F745 series). \_x000D\_ \_x000D\_ \_x000D\_
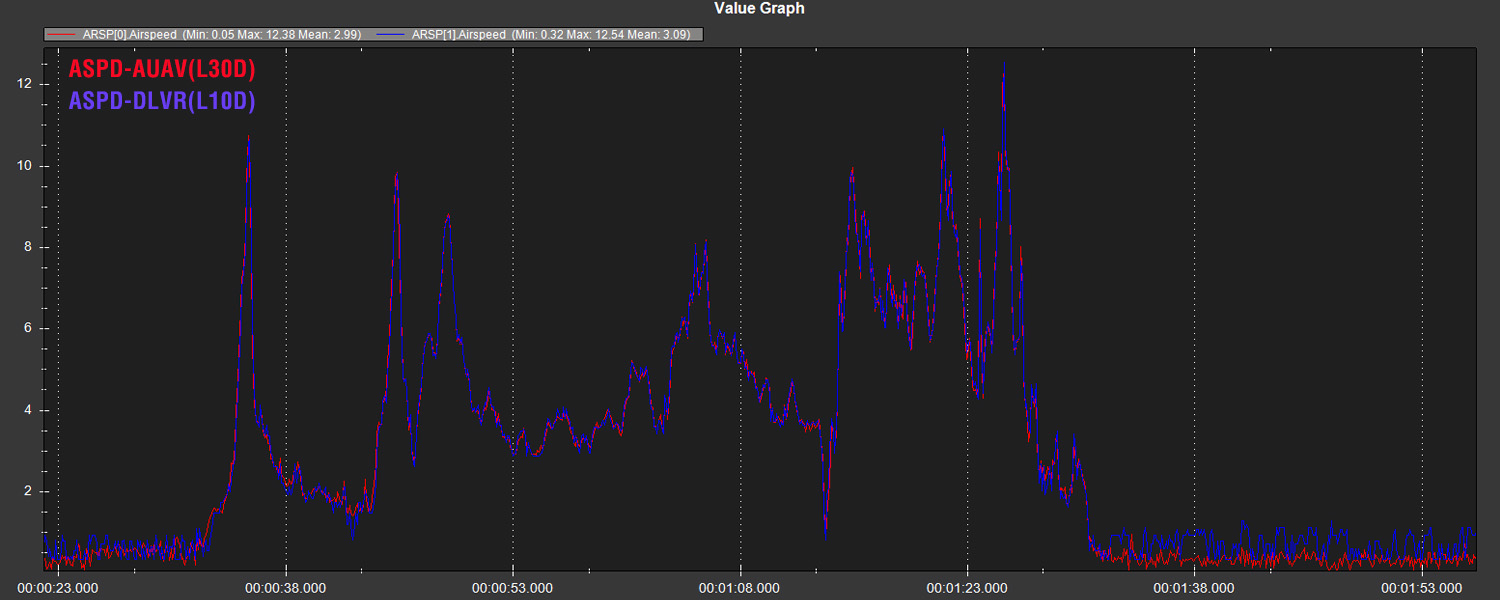
AUAV vs DLVR
\_x000D\_\* Speed range 400km/h vs 227km/h \_x000D\_\* AUAV has better offset in still air. \_x000D\_ \_x000D\_

\_x000D\_
\_x000D\_
Resellers
\_x000D\_\* [Aliexpress](https://www.aliexpress.com/item/1005009824882914.html) \_x000D\_ \_x000D\_
\_x000D\_ \_x000D\_